



Device Mapper 简介#
Device Mapper 是 linux 的内核用来将块设备映射到虚拟块设备的 framework,它支持许多高级卷管理技术。docker 的 devicemapper 存储驱动程序利用此框架的自动精简配置(thin provisioning) 和快照功能来管理 docker 镜像和容器。本文将 Device Mapper 存储驱动称为 devicemapper,将它的内核框架称为 Device Mapper。Device Mapper 不同于 AUFS、ext4、NFS 等,因为它并不是一个文件系统(File System),而是 Linux 内核映射块设备的一种技术框架。提供的一种从逻辑设备(虚拟设备)到物理设备的映射框架机制,在该机制下,用户可以很方便的根据自己的需要制定实现存储资源的管理策略。
当前比较流行的 Linux 下的逻辑卷管理器如 LVM2(Linux Volume Manager 2 version)、EVMS(Enterprise Volume Management System)、dmraid(Device Mapper Raid Tool)等都是基于该机制实现的。
值得一提的是 Device Mapper 工作在块级别(block),并不工作在文件级别(file)。Device Mapper 自 Linux 2.6.9 后编入 Linux 内核,所有基于 Linux 内核 2.6.9 以后的发行版都内置 Device Mapper,但你需要进行一些额外的配置才能在 docker 中使用它。比如在 RHEL 和 CentOS 系统中,docker 默认使用的存储驱动是 overlay。
devicemapper 存储驱动使用专用于 docker 的块设备,它运行在块级别上而不是文件级别。使用块设备比直接使用文件系统性能更好,通过向 Docker 的宿主机添加物理存储可以扩展块设备的存储空间。
用户空间和内核空间#
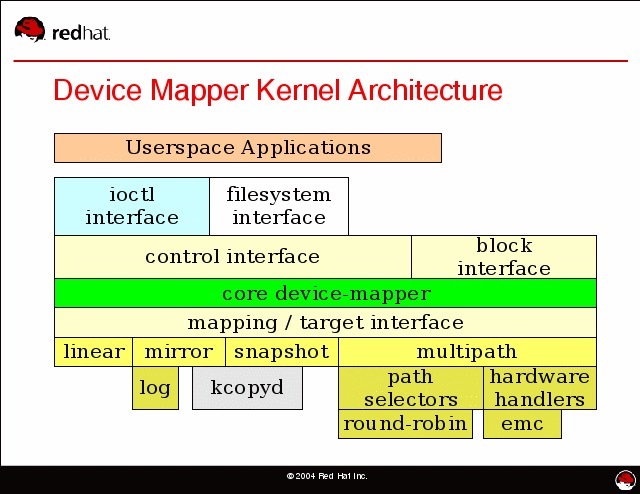
Device Mapper主要分为用户空间部分和内核空间部分
用户空间相关部分主要负责配置具体的策略和控制逻辑,比如逻辑设备和哪些物理设备建立映射,怎么建立这些映射关系等,包含 device mapper 库和 dmsetup 工具。对用户空间创建删除 device mapper 设备的操作进行封装。
内核中主要提供完成这些用户空间策略所需要的机制,负责具体过滤和重定向 IO 请求。通过不同的驱动插件,转发 IO 请求至目的设备上。附上 Device Mapper 架构图。
Device Mapper 技术分析#
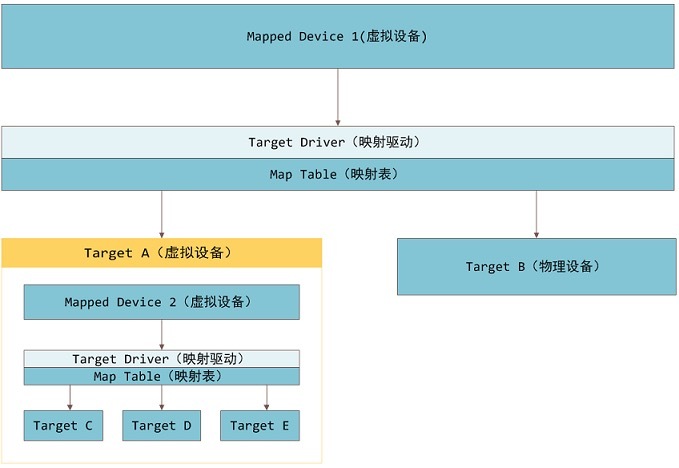
Device Mapper 作为 Linux 块设备映射技术框架,向外部提供逻辑设备。包含三个重要概念,映射设备(mapped device),映射表(map table),目标设备(target device)。
- 映射设备即对外提供的逻辑设备,映射设备向下寻找必须找到支撑的目标设备。
- 映射表存储映射设备和目标设备的映射关系。
- 目标设备可以是映射设备或者物理设备,如果目标设备是一块映射设备,则属于嵌套,理论上可以无限迭代下去。
简而言之,Device Mapper 对外提供一个虚拟设备供使用,而这块虚拟设备可以通过映射表找到相应的地址,该地址可以指向一块物理设备,也可以指向一个虚拟设备。
映射表,是由用户空间创建,传递到内核空间。映射表里有映射设备逻辑的起始地址、范围、和表示在目标设备所在物理设备的地址偏移量以及Target 类型等信息(注:这些地址和偏移量都是以磁盘的扇区为单位的,即 512 个字节大小,所以,当你看到 128 的时候,其实表示的是 128*512=64K)。
映射驱动在内核空间是插件,Device Mapper 在内核中通过一个一个模块化的 Target Driver 插件实现对 IO 请求的过滤或者重新定向等工作,当前已经实现的插件包括软 Raid、加密、多路径、镜像、快照等,这体现了在 Linux 内核设计中策略和机制分离的原则。
Device Mapper 中的 IO 流处理,从虚拟设备(逻辑设备)根据映射表并指定特定的映射驱动转发到目标设备上。
Docker 中的 Device Mapper 核心技术#
Docker 的 devicemapper 驱动有三个核心概念,copy on-write(写复制),thin-provisioning(精简配置)。snapshot(快照),首先简单介绍一下这三种技术。
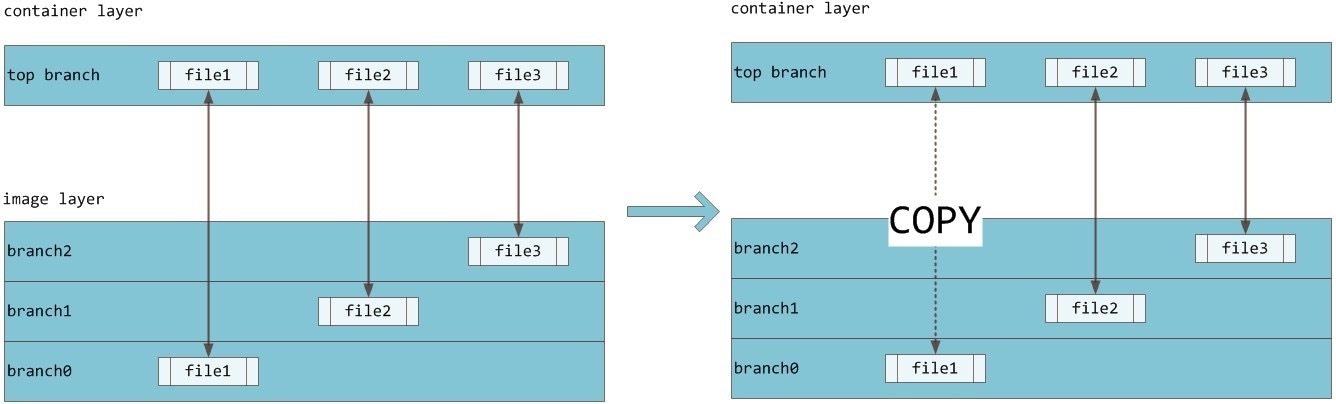
CoW(copy on write)写复制:一些文件系统提供的写时复制策略。aufs的 cow 原理如下:当容器需要修改一个文件,而该文件位于低层
branch时,顶层branch会直接复制低层branch的文件至顶层再进行修改,而低层的文件不变,这种方式即是 CoW 技术(写复制)。当容器删除一个低层
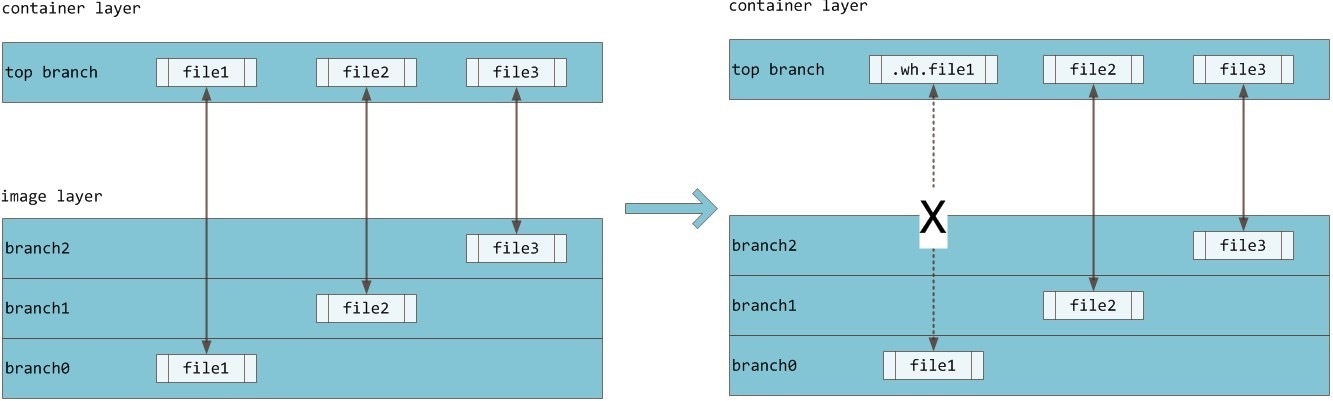
branch文件时,只是在顶层branch对该文件进行重命名并隐藏,实际并未删除文件,只是不可见。下图所示,容器层所见 file1 文件为镜像层文件,当需要修改 file1 时,会从镜像层把文件复制到容器层,然后进行修改,从而保证镜像层数据的完整性和复用性。
下图所示,当需要删除 file1 时,由于 file1 是镜像层文件,容器层会创建一个 .wh 前置的隐藏文件,从而实现对 file1 的隐藏,实际并未删除 file1,从而保证镜像层数据的完整性和复用性。
devicemapper支持在块级别(block)写复制。Snapshot(快照技术):关于指定数据集合的一个完全可用拷贝,该拷贝包括相应数据在某个时间点(拷贝开始的时间点)的映像。快照可以是其所表示的数据的一个副本,也可以是数据的一个复制品。而从具体的技术细节来讲,快照是指向保存在存储设备中的数据的引用标记或指针。Thin-provisioning(精简配置),直译为精简配置。Thin-provisioning是动态分配,需要多少分配多少,区别于传统分配固定空间从而造成的资源浪费。它是什么意思呢?你可以联想一下我们计算机中的内存管理中用到的——“虚拟内存技术”——操作系统给每个进程 N 多 N 多用不完的内址地址(32 位下,每个进程可以有最多 2GB 的内存空间),但是呢,我们知道,物理内存是没有那么多的,如果按照进程内存和物理内存一一映射来玩的话,那么,我们得要多少的物理内存啊。所以,操作系统引入了虚拟内存的设计,意思是,我逻辑上给你无限多的内存,但是实际上是实报实销,因为我知道你一定用不了那么多,于是,达到了内存使用率提高的效果。(今天云计算中很多所谓的虚拟化其实完全都是在用和“虚拟内存”相似的
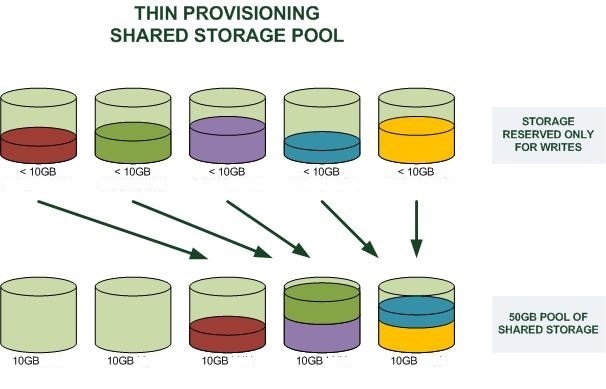
Thin Provisioning的技术,所谓的超配,或是超卖)。好了,话题拉回来,我们这里说的是存储。看下面两个图,第一个是
Fat Provisioning,第二个是Thin Provisioning,其很好的说明了是个怎么一回事(和虚拟内存是一个概念)。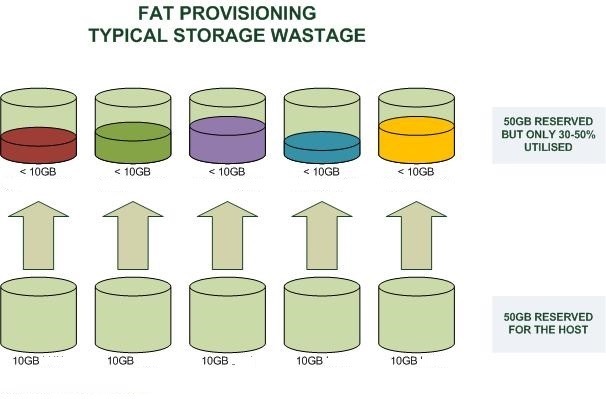
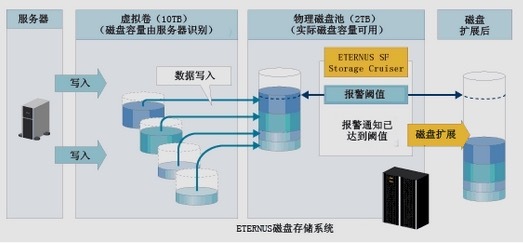
下图中展示了某位用户向服务器管理员请求分配 10TB 的资源的情形。实际情况中这个数值往往是峰值,根据使用情况,分配 2TB 就已足够。因此,系统管理员准备 2TB 的物理存储,并给服务器分配 10TB 的虚拟卷。服务器即可基于仅占虚拟卷容量 1/5 的现有物理磁盘池开始运行。这样的“始于小”方案能够实现更高效地利用存储容量。
那么,Docker 是怎么使用 Thin Provisioning 这个技术做到像 UnionFS 那样的分层镜像的呢?答案是,Docker 使用了 Thin Provisioning 的 Snapshot 的技术。下面一篇我们来介绍一下 Thin Provisioning 的 Snapshot。